Trickle: A Self-Regulating Algorithm for Code Propagation and Maintenance in Wireless Sensor Networks
Philip Levis†‡, Neil Patel†, David Culler†‡, and Scott Shenker†*
{pal,culler,shenker}@eecs.berkeley.edu, neilp@uclink.berkeley.edu
| †EECS Department | *ICSI | ‡Intel Research Berkeley |
| University of California, Berkeley | 1947 Center St. | 2150 Shattuck Ave. |
| Berkeley, CA 94720 | Berkeley, CA 94704 | Berkeley, CA, 94704 |
Abstract:
We present Trickle, an algorithm for propagating and maintaining code updates in wireless sensor networks. Borrowing techniques from the epidemic/gossip, scalable multicast, and wireless broadcast literature, Trickle uses a ``polite gossip'' policy, where motes periodically broadcast a code summary to local neighbors but stay quiet if they have recently heard a summary identical to theirs. When a mote hears an older summary than its own, it broadcasts an update. Instead of flooding a network with packets, the algorithm controls the send rate so each mote hears a small trickle of packets, just enough to stay up to date. We show that with this simple mechanism, Trickle can scale to thousand-fold changes in network density, propagate new code in the order of seconds, and impose a maintenance cost on the order of a few sends an hour.
1. Introduction
Composed of large numbers of small, resource constrained computing nodes ("motes"), sensor networks often must operate unattended for months or years. As requirements and environments evolve in lengthy deployments, users need to be able to introduce new code to re-task a network. The scale and embedded nature of these systems - buried in bird burrows or collared on roving herds of zebras for months or years - requires network code propagation. Networking has a tremendous energy cost, however, and defines the system lifetime: laptops can be recharged, but sensor networks die. An effective reprogramming protocol must send few packets.
While code is propagating, a network can be in a useless state due to there being multiple programs running concurrently. Transition time is wasted time, and wasted time is wasted energy. Therefore, an effective reprogramming protocol must also propagate new code quickly.
The cost of transmitting new code must be measured against the duty cycle of an application. For some applications, sending a binary image (tens of kilobytes) can have the same cost as days of operation. Some sensor network applications, such as Tiny Diffusion[8], Maté [12], and TinyDB [17], use concise, high-level virtual code representations to reduce this cost. In these applications, programs are 20-400 bytes long, a handful of packets.
Wireless sensor networks may operate at a scale of hundreds, thousands, or more. Unlike Internet based systems, which represent a wide range of devices linked through a common network protocol, sensor networks are independent, application specific deployments. They exhibit highly transient loss patterns that are susceptible to changes in environmental conditions [21]. Asymmetric links are common, and prior work has shown network behavior to often be worse indoors than out, predominantly due to multi-path effects [22]. Motes come and go, due to temporary disconnections, failure, and network repopulation. As new code must eventually propagate to every mote in a network, but network membership is not static, propagation must be a continuous effort.
Propagating code is costly; learning when to propagate code is even more so. Motes must periodically communicate to learn when there is new code. To reduce energy costs, motes can transmit metadata to determine when code is needed. Even for binary images, this periodic metadata exchange overwhelms the cost of transmitting code when it is needed. Sending a full TinyDB binary image (≈64 KB) costs approximately the same as transmitting a forty byte metadata summary once a minute for a day. In Maté, Tiny Diffusion, Tiny DB, and similar systems, this tradeoff is even more pronounced: sending a few metadata packets costs the same as sending an entire program. The communication to learn when code is needed overwhelms the cost of actually propagating that code.
The first step towards sensor network reprogramming, then, is an efficient algorithm for determining when motes should propagate code, which can be used to trigger the actual code transfer. Such an algorithm has three needed properties:
Low Maintenance: When a network is in a stable
state, metadata exchanges should be infrequent, just enough
to ensure that the network has a single program. The
transmission rate should be configurable to meet an
application energy budget; this can vary from transmitting
once a minute to every few hours.
Rapid Propagation: When the
network discovers motes that need updates, code must propagate
rapidly. Propagation should not take more than a minute or two more
than the time required for transmission, even for large networks that
are tens of hops across. Code must eventually propagate to every
mote.
Scalability: The protocol must maintain its other
properties in wide ranges of network density, from motes
having a few to hundreds of network neighbors. It cannot
require a priori density information, as density will
change due to environmental effects and node failure.
In this paper, we propose Trickle, an algorithm for code propagation and maintenance in wireless sensor networks. Borrowing techniques from the epidemic, scalable multicast, and wireless broadcast literatures, Trickle regulates itself using a local ``polite gossip'' to exchange code metadata (we defer a detailed discussion of Trickle with regards to this prior work to Section 6). Each mote periodically broadcasts metadata describing what code it has. However, if a mote hears gossip about identical metadata to its own, it stays quiet. When a mote hears old gossip, it triggers a code update, so the gossiper can be brought up to date. To achieve both rapid propagation and a low maintenance overhead, motes adjust the length of their gossiping attention spans, communicating more often when there is new code.
Trickle meets the three requirements. It imposes a maintenance overhead on the order of a few packets an hour (which can easily be pushed lower), propagates updates across multi-hop networks in tens of seconds, and scales to thousand-fold changes in network density. In addition, it handles network repopulation, is robust to network transience, loss, and disconnection, and requires very little state (in our implementation, eleven bytes).
In Section 2, we outline the experimental methodologies of this study. In Section 3, we describe the basic primitive of Trickle and its conceptual basis. In Section 4, we present Trickle's maintenance algorithm, evaluating its scalability with regards to network density. In Section 5, we show how the maintenance algorithm can be modified slightly to enable rapid propagation, and evaluate how quickly Trickle propagates code. We review related work in Section 6, and conclude in Section 7.
2. Methodology
We use three different platforms to investigate and evaluate
Trickle. The first is a high-level, abstract algorithmic
simulator written especially for this study. The second is
TOSSIM [13], a bit-level mote simulator for
TinyOS, a sensor network operating
system [10]. TOSSIM compiles directly from
TinyOS code. Finally, we used TinyOS mica-2 motes for
empirical studies, to validate our simulation results and
prove the real-world effectiveness of Trickle. The same
implementation of Trickle ran on motes and in TOSSIM.
To quickly evaluate Trickle under controlled conditions, we
implemented a Trickle-specific algorithmic simulator. Little
more than an event queue, it allows configuration of all of
Trickle's parameters, run duration, the boot time of motes,
and a uniform packet loss rate (same for all links) across a
single hop network. Its output is a packet send count.
The TOSSIM simulator compiles directly from TinyOS code,
simulating complete programs from application level logic to
the network at a bit level [13]. It simulates
the implementation of the entire TinyOS network stack,
including its CSMA protocol, data encodings, CRC checks,
collisions, and packet timing. TOSSIM models mote
connectivity as a directed graph, where vertices are motes
and edges are links; each link has a bit error rate, and as
the graph is directed, link error rates can be
asymmetric. This occurs when only one direction has good
connectivity, a phenomenon that several empirical studies
have
observed [3, 7, 22].
The networking stack (based on the mica platform
implementation) can handle approximately forty packets per
second, with each carrying a 36 byte payload.
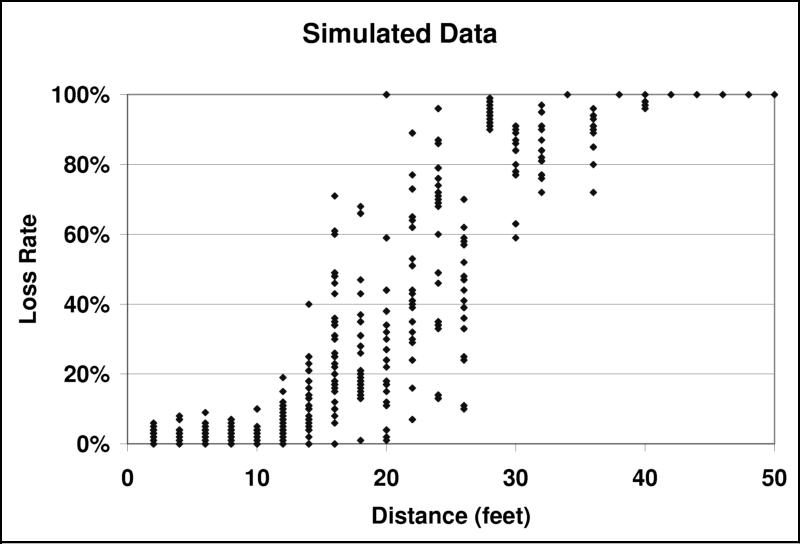
To generate network topologies, we used TOSSIM's empirical
model, based on data gathered from TinyOS
motes [7]. Figure 1
shows an experiment illustrating the model's packet loss
rates over distance (in feet). As link directions are
sampled independently, intermediate distances such as twenty
feet commonly exhibit link asymmetry. Physical topologies
are fed into the loss distribution function, producing a
loss topology. In our studies, link error rates were
constant for the duration of a simulation, but packet loss
rates could be affected by dynamic interactions such as
collisions at a receiver.
In addition to standard bit-level simulations, we used a
modified version of TOSSIM that supports packet-level
simulations. This version simulates loss due to packet
corruption from bit errors, but does not model
collisions. By comparing the results of the full bit-level
simulation and this simpler packet-level simulation, we can
ascertain when packet collisions - failures of the
underlying MAC - are the cause of protocol behavior. In
this paper, we refer to the full TOSSIM simulation as
TOSSIM-bit, and the packet level simulation as
TOSSIM-packet.
In our empirical experiments, we used TinyOS mica2 motes,
with a 916MHz radio.¹
These motes provide 128KB of program memory, 4KB of RAM, and
a 7MHz 8-bit microcontroller for a processor. The radio
transmits at 19.2 Kbit, which after encoding and media
access, is approximately forty TinyOS packets/second, each
with a thirty-six byte data payload. For propagation
experiments, we instrumented mica2 motes with a special
hardware device that bridges their UART to TCP; other
computers can connect to the mote with a TCP socket to read
and write data to the mote. We used this to obtain
millisecond granularity timestamps on network
events. Figure 2
shows a picture of one of the mica2 motes used in our
experiments.
We performed two empirical studies. One involved placing
varying number of motes on a table, with the transmission
strength set very low to create a small multi-hop
network. The other was a nineteen mote network in an office
area, approximately 160' by 40'. Section 5
presents the latter experiment in greater depth.
In the next three sections, we introduce and evaluate
Trickle. In this section, we describe the basic algorithm
primitive colloquially, as well as its conceptual basis. In
Section 4, we
describe the algorithm more formally, and evaluate the
scalability of Trickle's maintenance cost, starting with an
ideal case - a lossless and perfectly synchronized
single-hop network. Incrementally, we remove each of these
three constraints, quantifying scalability in simulation and
validating the simulation results with an empirical
study. In Section 5, we
show how, by adjusting the length of time intervals,
Trickle's maintenance algorithm can be easily adapted to
also rapidly propagate code while imposing a minimal
overhead. Trickle assumes that motes can succinctly describe
their code with metadata, and by comparing two different
pieces of metadata can determine which mote needs an update.
Trickle's basic primitive is simple: every so often, a mote
transmits code metadata if it has not heard a few other
motes transmit the same thing. This allows Trickle to scale
to thousand-fold variations in network density, quickly
propagate updates, distribute transmission load evenly, be
robust to transient disconnections, handle network
repopulations, and impose a maintenance overhead on the
order of a few packets per hour per mote.
Trickle sends all messages to the local broadcast
address. There are two possible results to a Trickle
broadcast: either every mote that hears the message is up to
date, or a recipient detects the need for an
update. Detection can be the result of either an out-of-date
mote hearing someone has new code, or an updated mote
hearing someone has old code. As long as every mote
communicates somehow - either receives or transmits - the
need for an update will be detected.
For example, if mote A broadcasts that it has code
φ, but B has code φ+1, then B knows
that A needs an update. Similarly, if B
broadcasts that it has φ+1, A knows that it needs
an update. If B broadcasts updates,
then all of its neighbors can receive them without having to
advertise their need. Some of these recipients might not
even have heard A's transmission.
In this example, it does not matter who first transmits,
A or B; either case will detect the
inconsistency. All that matters is that some motes
communicate with one another at some nonzero rate; we will
informally call this the ``communication rate.'' As long as
the network is connected and there is some minimum
communication rate for each mote, everyone will stay up to
date.
The fact that communication can be either transmission or
reception enables Trickle to operate in sparse as well as
dense networks. A single, disconnected mote must transmit at
the communication rate. In a lossless, single-hop network
of size n, the sum of transmissions over the network
is the communication rate, so for each mote it is
1/n. Sparser networks require more transmissions per
mote, but utilization of the radio channel over space
will not increase. This is an important property in wireless
networks, where the channel is a valuable shared
resource. Additionally, reducing transmissions in dense
networks conserves system energy.
We begin in Section 4 by
describing Trickle's maintenance algorithm, which tries to
keep a constant communication rate. We analyze its
performance (in terms of transmissions and communication) in
the idealized case of a single-hop lossless network with
perfect time synchronization. We relax each of these
assumptions by introducing loss, removing synchronization,
and using a multi-hop network. We show how each relaxation
changes the behavior of Trickle, and, in the case of
synchronization, modify the algorithm slightly to
accommodate.
Trickle uses "polite gossip" to exchange code metadata
with nearby network neighbors. It breaks time into
intervals, and at a random point in each interval, it
considers broadcasting its code metadata. If Trickle has
already heard several other motes gossip the same metadata
in this interval, it politely stays quiet: repeating what
someone else has said is rude.
When a mote hears that a neighbor is behind the times (it
hears older metadata), it brings everyone nearby up to date
by broadcasting the needed pieces of code. When a mote hears
that it is behind the times, it repeats the latest news it
knows of (its own metadata); following the first rule, this
triggers motes with newer code to broadcast it.
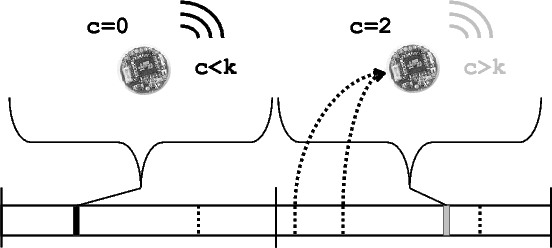
More formally, each mote maintains a counter c, a
threshold k, and a timer t in the range
[0,τ]. k is a small, fixed integer (e.g., 1 or 2)
and τ is a time constant. We discuss the selection of
τ in depth in Section 6. When a mote hears metadata
identical to its own, it increments c. At
timet, the mote broadcasts its metadata if
c<k . When the interval of size τ completes,
c is reset to zero and t is reset to a new
random value in the range [0,τ]. If a mote with code
φ hears a summary for φ-x, it broadcasts the code
necessary to bring φ-x up to φ. If it hears a
summary for φ+x, it broadcasts its own summary,
triggering the mote with φ+x to send updates.
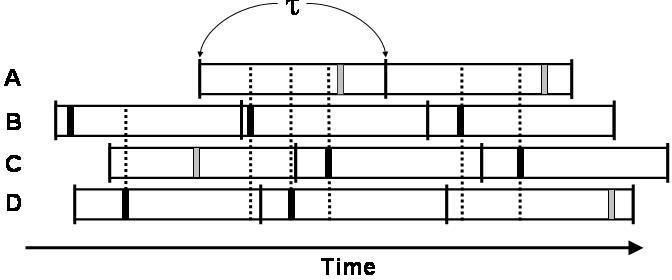
Figure 3 has a visualization of
Trickle in operation on a single mote for two intervals of
length τ with a k of 1 and no new code. In the
first interval, I₁, the mote does not hear any
transmissions before its t, and broadcasts. In the
second interval, I₂, it hears two broadcasts of
metadata identical to its, and so suppresses its broadcast.
Using the Trickle algorithm, each mote broadcasts a summary
of its data at most once per period τ. If a mote hears
k motes with the same program before it transmits, it
suppresses its own transmission. In perfect network
conditions - a lossless, single-hop topology - there will be
k transmissions every τ. If there are n
motes and m non-interfering single-hop networks,
there will be km transmissions, which is independent
of n. Instead of fixing the per-mote send rate,
Trickle dynamically regulates its send rate to the network
density to meet a communication rate, requiring no a priori
assumptions on the topology. In each interval τ, the sum
of receptions and sends of each mote is k.
The random selection of t uniformly distributes the
choice of who broadcasts in a given interval. This evenly
spreads the transmission energy load across the network. If
a mote with n neighbors needs an update, the expected
latency to discover this from the beginning of the interval
is
This km transmission count depends on three
assumptions: no packet loss, perfect interval
synchronization, and a single-hop network. We visit and then
relax each of these assumptions in turn. Discussing each
assumption separately allows us to examine the effect of
each, and in the case of interval synchronization, helps us
make a slight modification to restore scalability.
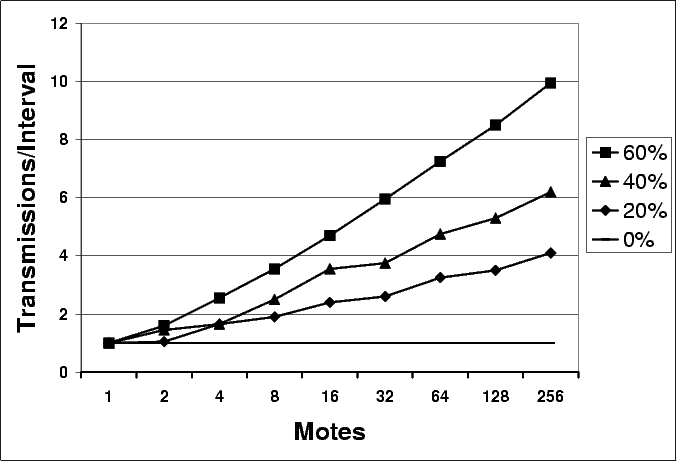
The above results assume that motes hear every transmission;
in real-world sensor networks, this is rarely the case.
Figure 4 shows how
packet loss rates affect the number of Trickle transmissions
per interval in a single-hop network as density
increases. These results are from the abstract simulator,
with k=1. Each line is a uniform loss
rate for all node pairs. For a given rate, the number of
transmissions grows with density at O(log(n)).
This logarithmic behavior represents the probability that a
single mote misses a number of transmissions. For example,
with a 10% loss rate, there is a 10% chance a mote will miss
a single packet. If a mote misses a packet, it will
transmit, resulting in two transmissions. There is
correspondingly a 1% chance it will miss two, leading to
three transmissions, and a 0.1% chance it will miss three,
leading to four. In the extreme case of a 100% loss rate,
each mote is by itself: transmissions scale linearly.
Unfortunately, to maintain a per-interval minimum
communication rate, this logarithmic scaling is inescapable:
O(log(n)) is the best-case behavior. The increase in
communication represents satisfying the requirements of the
worst case mote; in order to do so, the expected case must
transmit a little bit more. Some motes don't hear the gossip
the first time someone says it, and need it repeated. In the
rest of this work, we consider O(log(n)) to be the
desired scalability.
The above results assume that all motes have synchronized
intervals. Inevitably, time synchronization imposes a
communication, and therefore energy, overhead. While some
networks can provide time synchronization to Trickle, others
cannot. Therefore, Trickle should be able to work in the
absence of this primitive.
Unfortunately, without synchronization, Trickle can suffer
from the short-listen problem. Some subset of motes
gossip soon after the beginning of their interval, listening
for only a short time, before anyone else has a chance to
speak up. If all of the intervals are synchronized, the
first gossip will quiet everyone else. However, if not
synchronized, it might be that a mote's interval begins just
after the broadcast, and it too has chosen a short listening
period. This results in redundant transmissions.
Figure 5 shows an
instance of this phenomenon. In this example, mote B selects
a small t on each of its three intervals. Although
other motes transmit, mote B never hears those transmissions
before its own, and its transmissions are never
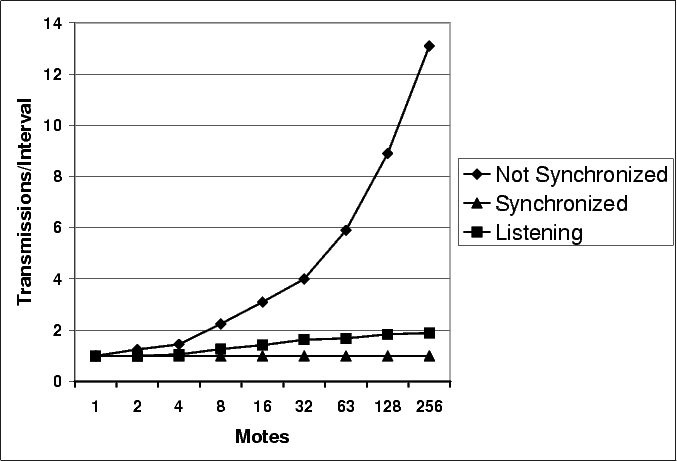
suppressed. Figure 6 shows how
the short-listen problem effects the transmission rate in a
lossless network with k=1. A perfectly synchronized
single-hop network scales perfectly, with a constant number
of transmissions. In a network without any synchronization
between intervals, however, the number of transmissions per
interval increases significantly.
The short-listen problem causes the number of transmissions
to scale as O(√n) with network density. ²
Unlike loss, where extra O(log(n)) transmissions are
sent to keep the worst case mote up to date, the additional
transmissions due to a lack of synchronization are
completely redundant, and represent avoidable inefficiency.
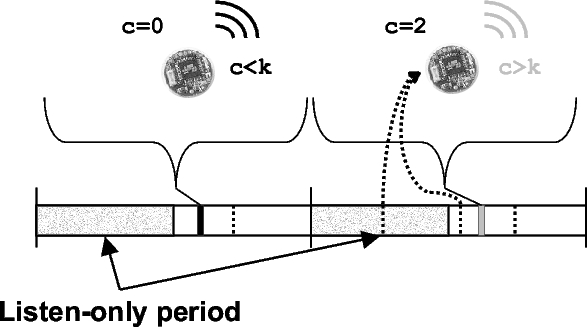
To remove the short-listen effect, we modified Trickle
slightly. Instead of picking a t in the range
[0,τ], t is selected in the range
[0.5τ,τ], defining a ``listen-only'' period of the
first half of an interval. Figure 7 depicts the modified
algorithm. A listening period improves scalability by
enforcing a simple constraint. If sending a message
guarantees a silent period of some time T that is
independent of density, then the send rate is bounded above
(independent of the density). When a mote transmits, it
suppresses all other motes for at least the length of the
listening period. With a listen period of τ/2, it bounds
the total sends in a lossless single-hop network to be
2k, and with loss scales as O(2k ⋅
log(n)), returning scalability to the O(log(n))
goal.
The ``Listening'' line in Figure 6 shows the number of transmissions in
a single-hop network with no synchronization when Trickle
uses this listening period. As the network density
increases, the number of transmissions per interval
asymptotically approaches two. The listening period does not
harm performance when the network is synchronized: there are
k transmissions, but they are all in the second half
of the interval.
To work properly, Trickle needs a source of randomness; this
can come from either the selection of t or from a
lack of synchronization. By using both sources, Trickle
works in either circumstance, or any point between the two
(e.g., partial or loose synchronization).
To understand Trickle's behavior in a multi-hop network, we
used TOSSIM, randomly placing motes in a 50'x50' area with a
uniform distribution, a τ of one second, and a k
of 1. To discern the effect of packet collisions, we used
both TOSSIM-bit and TOSSIM-packet (the former models
collisions, and the latter does not). Drawing from the loss
distributions in Figure 1,
a 50'x50' grid is a few hops wide. Figure 8 shows the results of this
experiment.
Figure 8(a) shows how the
number of transmissions per interval scales as the number of
motes increases. In the absence of collisions, Trickle
scales as expected, at O(log(n)). This is also true
in the more accurate TOSSIM-bit simulations for low to
medium densities; however, once there is over 128 motes, the
number of transmissions increases significantly.
This result is troubling - it suggests that Trickle cannot
scale to very dense networks. However, this turns out to be
a limitation of TinyOS's CSMA as network utilization
increases, and not Trickle itself. Figure 8(b) shows the average number of
receptions per transmission for the same
experiments. Without packet collisions, as network density
increases exponentially, so does the reception/transmission
ratio. Packet collisions increase loss, and therefore the
base of the logarithm in Trickle's O(log(n))
scalability. The increase is so great that Trickle's
aggregate transmission count begins to scale linearly. As
the number of transmissions over space increases, so does
the probability that two will collide.
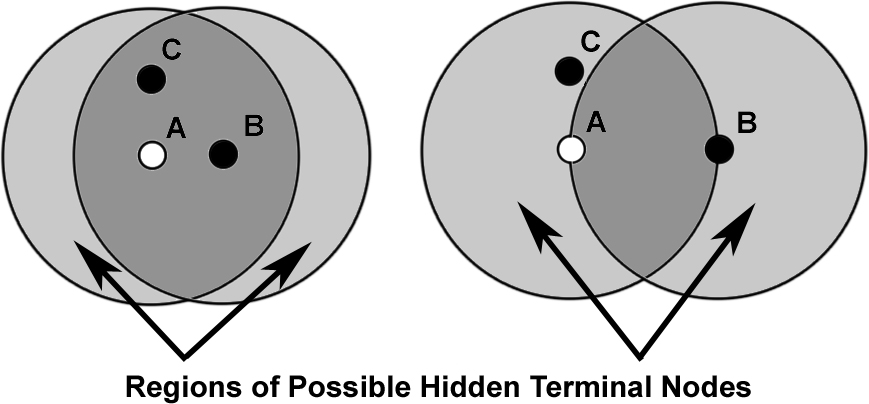
As the network becomes very dense, it succumbs to the
hidden terminal problem, a known issue with CSMA
protocols. In the classic hidden terminal situation, there
are three nodes, A, B, and C, with effective carrier sense
between A and B as well as A and C. However, as B and C do
not hear one another, a CSMA protocol will let them transmit
at the same time, colliding at A, who will hear neither. In
this situation, B is a hidden terminal to C and vice versa.
Figure 9 shows an instance of
this phenomenon in a simplistic disk model.
In TOSSIM-bit, the reception/transmission ratio plateaus
around seventy-five: each mote thinks it has about
seventy-five one-hop network neighbors. At high densities,
many packets are being lost due to collisions due to the
hidden terminal problem. In the perfect scaling model, the
number of transmissions for m isolated and
independent single-hop networks is mk. In a network,
there is a physical density (defined by the radio
range), but the hidden terminal problem causes motes to lose
packets; hearing less traffic, they are aware of a smaller
observed density. Physical density represents the
number of motes who can hear a transmission in the absence
of any other traffic, while observed density is a function
of other, possibly conflicting, traffic in the
network. Increasing physical density also make collision
more likely; observed density does not necessarily increase
at the same rate.
When collisions make observed density lower than physical
density, the set of motes observed to be neighbors is tied
to physical proximity. The set of motes that can interfere
with communication by the hidden terminal problem is larger
when two motes are far away than when they are
close. Figure 9
depicts this relationship.
Returning to Figure 8(b),
from each mote's perspective in the 512 and 1024 mote
experiments, the observed density is seventy-five
neighbors. This does not change significantly as physical
density increases. As a mote that can hear n
neighbors, ignoring loss and other complexities, will
broadcast in an interval with probability 1/n, the
lack of increase in observed density increases the number of
transmissions (e.g., (512/75) -> (1024/75)).
TOSSIM simulates the mica network stack, which can handle
approximately forty packets a second. As utilization reaches
a reasonable fraction of this (e.g., 10 packets/second, with
128 nodes), the probability of a collision becomes
significant enough to affect Trickle's behavior. As long as
Trickle's network utilization is low, it scales as
expected. However, increased utilization affects
connectivity patterns, so that Trickle must transmit more
than in an quiet network. The circumstances of
Figure 8, very dense
networks and a tiny interval, represent a corner case. As
we present in Section 5,
maintenance intervals are more likely to be on the order of
tens of minutes. At these interval sizes, network
utilization will never grow large as long as k is
small.
To better understand Trickle in multi-hop networks, we use
the metric of redundancy. Redundancy is the portion
of messages heard in an interval that were unnecessary
communication. Specifically, it is each mote's expected
value of
Redundancy can be computed for the single-hop experiments
with uniform loss (Figures 4 and 6). For example, in a single-hop
network with a uniform 20% loss rate and a k of 1, 3
transmissions/interval has a redundancy of
1.4=((3⋅0.8)-1) as the expectation is that each mote
receives 2.4 packets, and three motes transmit.
Figure 8(c)
shows a plot of Trickle redundancy as network density
increases. For a one-thousand mote- larger than any yet
deployed - multi-hop network, in the presence of link
asymmetry, variable packet loss, and the hidden terminal
problem, the redundancy is just over 3.
Redundancy grows with a simple logarithm of the observed
density, and is due to the simple problem outlined in
Section 4.1: packets
are lost. To maintain a communication rate for the worst
case mote, the average case must communicate a little bit
more. Although the communication increases, the actual
per-mote transmission rate shrinks. Barring MAC failures,
Trickle scales as hoped - O(log(n)) - in multi-hop
networks.
One of the goals of Trickle is to impose a low overhead. The
above simulation results show that few packets are sent in a
network. However, this raises the question of which motes
sent those packets; 500 transmissions evenly distributed
over 500 motes does not impose a high cost, but 500 messages
by one mote does.
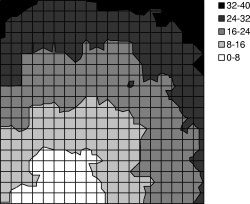
Figure 10(a) shows the
transmission distribution for a simulated 400 mote network
in a 20 mote by 20 mote grid with a 5 foot spacing (the
entire grid was 95'x95'), run in TOSSIM-bit. Drawing from
the empirical distributions in Figure 1, a five foot spacing forms a six
hop network from grid corner to corner. This simulation was
run with a τ of one minute, and ran for twenty minutes
of virtual time. The topology shows that some motes send
more than others, in a mostly random pattern. Given that the
predominant range is one, two, or three packets, this
non-uniformity is easily attributed to statistical
variation. A few motes show markedly more transmissions, for
example, six. This is the result of some motes being poor
receivers. If many of their incoming links have high loss
rates (drawn from the distribution in Figure 1), they will have a small observed
density, as they receive few packets.
Figure 10(b)
shows the reception distribution. Unlike the transmission
distribution, this shows clear patterns. motes toward the
edges and corners of the grid receive fewer packets than
those in the center. This is due to the non-uniform network
density; a mote at a corner has one quarter the neighbors as
one in the center. Additionally, a mote in the center has
many more neighbors that cannot hear one another; so that a
transmission in one will not suppress a transmission in
another. In contrast, almost all of the neighbors of a
corner mote can hear one another. Although the transmission
topology is quite noisy, the reception topography is
smooth. The number of transmissions is very small compared
to the number of receptions: the communication rate across
the network is fairly uniform.
To evaluate Trickle's scalability in a real network, we
recreated, as best we could, the experiments shown in
Figures 6 and
8. We
placed motes on a small table, with their transmission
signal strength set very low, making the table a small
multi-hop network. With a
The above results quantified the maintenance
overhead. Evaluating propagation requires an implementation;
among other things, there must be code to propagate. In the
next section, we present an implementation of Trickle,
evaluating it in simulation and empirically.
A large τ (gossiping interval) has a low communication
overhead, but slowly propagates information. Conversely, a
small τ has a higher communication overhead, but
propagates more quickly. These two goals, rapid propagation
and low overhead, are fundamentally at odds: the former
requires communication to be frequent, while the latter
requires it to be infrequent.
By dynamically scaling τ, Trickle can use its
maintenance algorithm to rapidly propagate updates with a
very small cost. τ has a lower bound, τ-l, and an
upper bound τ-h. When τ expires, it doubles, up to
τ-h. When a mote hears a summary with newer data than
it has, it resets τ to be τ-l. When a mote hears a
summary with older code than it has, it sends the code, to
bring the other mote up to date. When a mote installs new
code, it resets τ to τ-l, to make sure that it
spreads quickly. This is necessary for when a mote receives
code it did not request, that is, didn't reset its τ
for. Figure 12 shows
pseudocode for this complete version of Trickle.
Essentially, when there's nothing new to say, motes gossip
infrequently: τ is set to τ-h. However, as soon as a
mote hears something new, it gossips more frequently, so
those who haven't heard it yet find out. The chatter then
dies down, as τ grows from τ-l to τ-h.
By adjusting τ in this way, Trickle can get the best of
both worlds: rapid propagation, and low maintenance
overhead. The cost of a propagation event, in terms of
additional sends caused by shrinking τ, is approximately
We evaluate an implementation of Trickle, incorporated into
Maté, a tiny bytecode interpreter for TinyOS sensor
networks [12]. We first present a brief overview
of Maté and its Trickle implementation. Using TOSSIM,
we evaluate how how rapidly Trickle can propagate an update
through reasonably sized (i.e., 400 mote) networks of
varying density. We then evaluate Trickle's propagation rate
in a small (20 mote) real-world network.
Maté has a small, static set of code routines. Each routine can
have many versions, but the runtime only keeps the most recent one. By
replacing these routines, a user can update a network's program. Each
routine fits in a single TinyOS packet and has a version number. The
runtime installs routines with a newer version number when it receives
them.
Instead of sending entire routines, motes can broadcast version
summaries. A version summary contains the version numbers of all of
the routines currently installed. A mote determines that someone else
needs an update by hearing that they have an older version.
Maté uses Trickle to periodically broadcast version
summaries. In all experiments, code routines fit in a single
TinyOS packet (30 bytes). The runtime registers routines
with a propagation service, which then maintains all of the
necessary timers and broadcasts, notifying the runtime when
it installs new code. The actual code propagation mechanism
is outside the scope of Trickle, but we describe it here for
completeness. When a mote hears an older vector, it
broadcasts the missing routines three times: one second,
three seconds, and seven seconds after hearing the
vector. If code transmission redundancy were a performance
issue, it could also use Trickle's suppression
mechanism. For the purpose of our experiments, however, it
was not.
The Maté implementation maintains a 10Hz timer, which
it uses to increment a counter. t and τ are
represented in ticks of this 10Hz clock. Given that the
current mote platforms can transmit on the order of 40
packets/second, we found this granularity of time to be
sufficient. If the power consumption of maintaining a 10Hz
clock were an issue (as it may be in some deployments), a
non-periodic implementation could be used instead.
We used TOSSIM-bit to observe the behavior of Trickle during
a propagation event. We ran a series of simulations, each of
which had 400 motes regularly placed in a 20x20 grid, and
varied the spacing between motes. By varying network
density, we could examine how Trickle's propagation rate
scales over different loss rates and physical densities.
Density ranged from a five foot spacing between motes up to
twenty feet (the networks were 95'x95' to 380'x380'). We set
τ-l to one second and τ-h to one minute. From corner
to corner, these topologies range from six to forty
hops. ³
The simulations ran for five virtual minutes. motes booted
with randomized times in the first minute, selected from a
uniform distribution. After two minutes, a mote near one
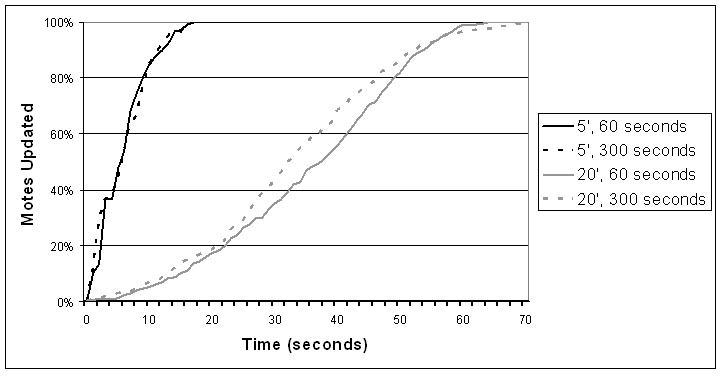
corner of the grid advertised a new Maté routine. We
measured the propagation time (time for the last mote to
install the new routine from the time it first appeared) as
well as the topographical distribution of routine
installation time. The results are shown in Figures 13 and
14. Time
to complete propagation varied from 16 seconds in the
densest network to about 70 seconds for the
sparsest. Figure 13
shows curves for only the 5' and 20' grids; the 10' and 15'
grid had similar curves.
Figure 14(a)
shows a manifestation of the hidden terminal problem. This
topography doesn't have the wave pattern we see in the
experiments with sparser networks. Because the network was
only a few hops in area, motes near the edges of the grid
were able to receive and install the new capsule quickly,
causing their subsequent transmissions to collide in the
upper right corner. In contrast, the sparser networks
exhibited a wave-like propagation because the sends mostly
came from a single direction throughout the propagation
event.
Figure 13
shows how adjusting τ-h
changes the propagation time for the five and twenty foot
spacings. Increasing τ-h
from one minute to five does not significantly affect the
propagation time; indeed, in the sparse case, it propagates
faster until roughly the 95th percentile. This result
indicates that there may be little trade-off between the
maintenance overhead of Trickle and its effectiveness in the
face of a propagation event.
A very large τ-h can increase the time to discover
inconsistencies to be approximately τ-h/2. However, this is only
true when two stable subnets (τ=τ-h) with different
code reconnect. If new code is introduced, it immediately
triggers motes to τ-l, bringing the network to action.
As Trickle was implemented as part of Maté, several
other services run concurrently with it. The only one of
possible importance is the ad-hoc routing protocol, which
periodically sends out network beacons to estimate link
qualities. However, as both Trickle packets and these
beacons are very infrequent compared to channel capacity
(e.g., at most 1 packet/second), this does not represent a
significant source of noise.
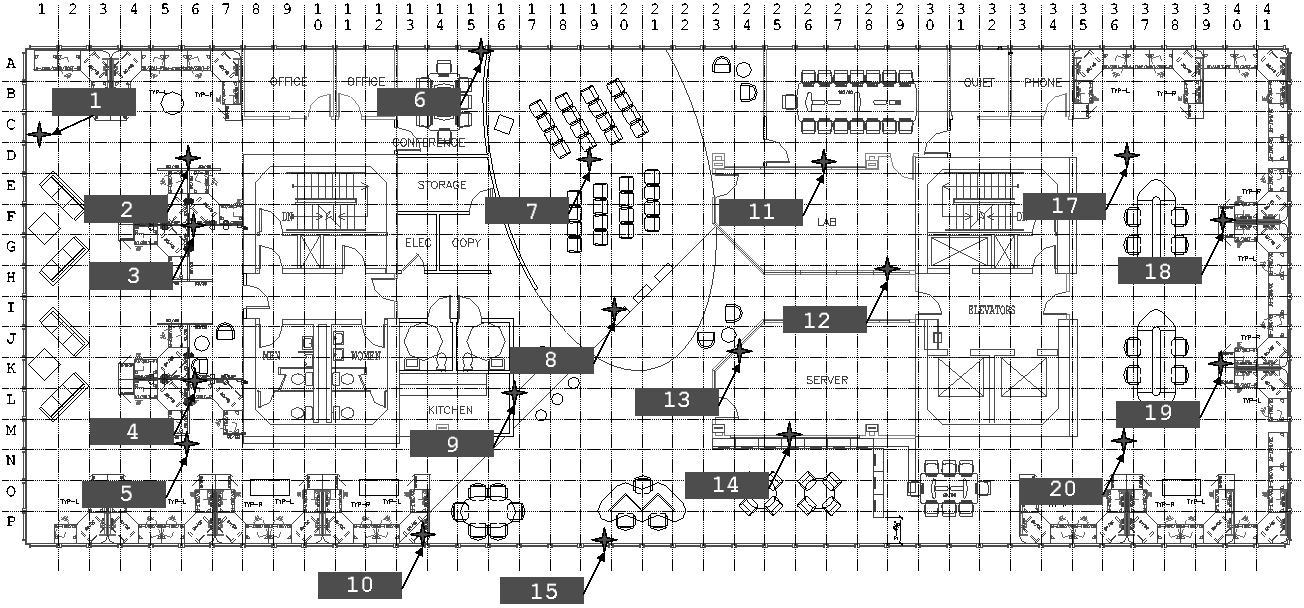
We deployed a nineteen mote network in an office area,
approximately 160' by 40'. We instrumented fourteen of the
motes with the TCP interface described in Section 2,
for precise timestamping. When Maté installed a new
piece of code, it sent out a UART packet; by opening sockets
to all of the motes and timestamping when this packet is
received, we can measure the propagation of code over a
distributed area.
Figure 15
shows a picture of the office space and the placement of the
motes. motes 4, 11, 17, 18 and 19 were not instrumented;
motes 1, 2, 3, 5, 6, 7, 8, 9, 10, 12, 13, 14, 15, and 20
were. mote 16 did not exist.
As with the above experiments, Trickle was configured with a
τ-l of one second and a τ-h of one minute. The
experiments began with the injection of a new piece of code
through a TinyOS GenericBase, which is a simple bridge
between a PC and a TinyOS network. The GenericBase broadcast
the new piece of code three times in quick succession. We
then logged when each mote had received the code update, and
calculated the time between the first transmission and
installation.
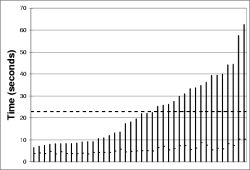
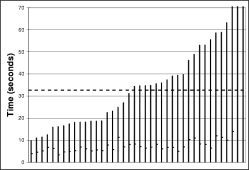
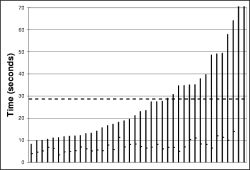
The left hand column of Figure 16 shows the results
of these experiments. Each bar is a separate experiment (40
in all). The worst-case reprogramming time for the
instrumentation points was just over a minute; the best case
was about seven seconds. The average, shown by the dark
dotted line, was just over twenty-two seconds for a τ-h
of sixty seconds (Figure 16(a)), while it
was thirty-two seconds for a τ-h of twenty minutes
(Figure 16(b)).
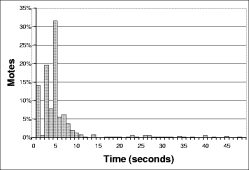
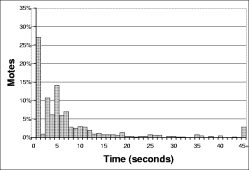
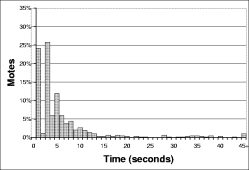
The right hand column of Figure 16 shows a
distribution of the time to reprogramming for individual
motes across all the experiments. This shows that almost all
motes are reprogrammed in the first ten seconds: the longer
times in Figure 16 are from the very
long tail on this distribution. The high loss
characteristics of the mote radio, combined with t's
exponential scaling, make this an issue. When scaling
involves sending only a handful (e.g., log₂(60)) of
packets in a neighborhood in order to conserve energy, long
tails are inevitable.
In Figure 16,
very few motes reprogram between one and two seconds after
code is introduced. This is an artifact of the granularity
of the timers used, the capsule propagation timing, and the
listening period. Essentially, from the first broadcast,
three timers expire: [τ-l/2,τ-l] for motes with the
new code, [τ-l/2,τ-l] for motes saying they have old
code, then one second before the first capsule is sent. This
is approximately τ-l +1; with a τ-l of one second,
this latency is two seconds.
The Maté implementation of Trickle requires few system
resources. It requires approximately seventy bytes of RAM;
half of this is a message buffer for transmissions, a
quarter is pointers to the Maté routines. Trickle
itself requires only eleven bytes for its counters; the
remaining RAM is used by coordinating state such as pending
and initialization flags. The executable code is 2.5 KB;
TinyOS's inlining and optimizations can reduce this by
roughly 30%, to 1.8K. The algorithm requires few CPU cycles,
and can operate at a very low duty cycle.
Trickle draws on two major areas of prior research. Both
assume network characteristics distinct from low-power
wireless sensor networks, such as cheap communication,
end-to-end transport, and limited (but existing) loss. The
first area is controlled, density-aware flooding algorithms
for wireless and multicast
networks [6,15,18]. The
second is epidemic and gossiping algorithms for maintaining
data consistency in distributed
systems [2,4,5].
Prior work in network broadcasts has dealt with a different
problem than the one Trickle tackles: delivering a piece of
data to as many nodes as possible within a certain time
period. Early work showed that in wireless networks, simple
broadcast retransmission could easily lead to the broadcast
storm problem [18], where competing
broadcasts saturate the network. This observation led to
work in probabilistic
broadcasts [15,20],
and adaptive
dissemination [9]. Just as
with earlier work in bimodal epidemic
algorithms [1], all of these algorithms
approach the problem of making a best-effort attempt to send
a message to all nodes in a network, then eventually stop.
For example, Ni et al. propose a counter-based algorithm to
prevent the broadcast storm problem by suppressing
retransmissions [18]. This algorithm
operates on a single interval, instead of continuously. As
results in Figure 16>
show, the loss rates in the class of wireless sensor network
we study preclude a single interval from being
sufficient. Additionally, their studies were on lossless,
disk-based network topologies; it is unclear how they would
perform in the sort of connectivity observed in the real
world [11].
This is insufficient for sensor network code
propagation. For example, it is unclear what happens if a
mote rejoins three days after the broadcast. For
configurations or code, the new mote should be brought up to
date. Using prior wireless broadcast techniques, the only
way to do so is periodically rebroadcast to the entire
network. This imposes a significant cost on the entire
network. In contrast, Trickle locally distributes data
where needed.
The problem of propagating data updates through a
distributed system has similar goals to Trickle, but prior
work has been based on traditional wired network
models. Demers et al. proposed the idea of using epidemic
algorithms for managing replicated
databases [5], while the
PlanetP project [4]
uses epidemic gossiping for a a distributed peer-to-peer
index. Our techniques and mechanisms draw from these
efforts. However, while traditional gossiping protocols use
unicast links to a random member of a neighbor set, or based
on a routing overlay [2], Trickle uses only a
local wireless broadcast, and its mechanisms are
predominantly designed to address the complexities that
result.
Gossiping through the exchange of metadata is reminiscent of
SPIN's three-way handshaking protocol [9]; the Impala system,
deployed in ZebraNet, uses a similar approach [14]. Specifically, Trickle is similar to
SPIN-RL, which works in broadcast environments and provides
reliability in lossy networks. Trickle differs from and
builds on SPIN in three major ways. First, the SPIN
protocols are designed for transmitting when they detect an
update is needed; Trickle's purpose is to perform that
detection. Second, the SPIN work points out that
periodically re-advertising data can improve reliability,
but does not suggest a policy for doing so; Trickle is such
a policy. Finally, the SPIN family, although
connectionless, is session oriented. When a node A hears an
advertisement from node B, it then requests the data from
node B. In contrast, Trickle never considers
addresses. Taking the previous example, with Trickle B sends
an implicit request, which a node besides A may respond to.
Trickle's suppression mechanism is inspired by the
request/repair algorithm used in Scalable and Reliable
Multicast (SRM) [6]. However, SRM focuses on
reliable delivery of data through a multicast group in a
wired IP network. Using IP multicast as a primitive, SRM has
a fully connected network where latency is a concern.
Trickle adapts SRM's suppression mechanisms to the domain of
multi-hop wireless sensor networks.
Although both techniques - broadcasts and epidemics - have
assumptions that make them inappropriate to problem of code
propagation and maintenance in sensor networks, they are
powerful techniques that we draw from. An effective
algorithm must adjust to local network density as controlled
floods do, but continually maintain consistency in a manner
similar to epidemic algorithms. Taking advantage of the
broadcast nature of the medium, a sensor network can use
SRM-like duplicate suppression to conserve precious
transmission energy and scale to dense networks.
In the sensor network space, Reijers et al. propose energy
efficient code distribution by only distributing changes to
currently running code [19]. The work
focuses on developing an efficient technique to compute and
update changes to a code image through memory manipulation,
but does not address the question of how to distribute the
code updates in a network or how to validate that nodes have
the right code. It is a program encoding that Trickle or a
Trickle-like protocol can use to transmit updates.
The TinyDB sensor network query system uses an epidemic
style of code forwarding [16]. However,
it depends on periodic data collection with embedded
metadata. Every tuple routed through the network has a query
ID associated with it and a mote requests a new query when
it hears it. In this case, the metadata has no cost, as it
would be sent anyways. Also, this approach does not handle
event-driven queries for rare events well; the query
propagates when the event occurs, which may be too late.
Using listen periods and dynamic τ values, Trickle meets
the requirements set out in Section 1. It can quickly propagate new code
into a network, while imposing a very small overhead. It
does so using a very simple mechanism, and requires very
little state. Scaling logarithmically with density, it can
be used effectively in a wide range of networks. In one of
our empirical experiments, Trickle imposes an overhead of
less than three packets per hour, but reprograms the entire
network in thirty seconds, with no effort from an end user.
A trade-off emerges between energy overhead and
reprogramming rate. By using a dynamic communication rate,
Trickle achieves a reprogramming rate comparable to frequent
transmissions while keeping overhead comparable to
infrequent transmissions. However, as Figure 16 shows, the exact
relationship between constants such as τ-h and k
is unclear in the context of these high loss
networks. τ-l affects the head of the distribution ,
while τ-h affects the tail.
In this study, we have largely ignored the actual policy
used to propagate code once Trickle detects the need to do
so: Maté merely broadcasts code routines three times.
Trickle suppression techniques can also be used to control
the rate of code transmission. In the current Maté
implementation, the blind code broadcast is a form of
localized flood; Trickle acts as a flood control
protocol. This behavior is almost the inverse of protocols
such as SPIN [9], which
transmits metadata freely but controls data transmission.
Assuming complete network propagation allows Trickle to
decouple code advertisement from code transmission. As the
protocol does not consider network addresses, the mote that
advertises code - leading to an implicit request - may not
be the one that transmits it. Instead of trying to enforce
suppression on an abstraction of a logical group, which can
become difficult in multi-hop networks, Trickle suppresses
in terms of space, implicitly defining a
group. Correspondingly, Trickle does not impose the overhead
of discovering and maintaining logical groups, which can be
significant.
One limitation of Trickle is that it currently assumes motes
are always on. To conserve energy, long-term mote
deployments often have very low duty cycles (e.g.,
1%). Correspondingly, motes are rarely awake, and rarely
able to receive messages. Communication scheduling schemes
can define times for code communication, during which motes
in the network wake up to run Trickle. Essentially, the
Trickle time intervals become logical time, spread over all
of the periods motes are actually awake. Understandably,
this might require alternative tunings of τ-h and
k. Trickle's scalability, however, stems from
randomization and idle listening. As Section 8 showed, Trickle's transmission
scalability suffers under a CSMA protocol as utilization
increases. Another, and perhaps more promising, option is to
use low power listening, where transmitters send very long
start symbols so receivers can detect packets when sampling
the channel at a very low rate [10]. For more dense networks, the
receiver energy savings could make up for the transmitter
energy cost.
Trickle was designed as a code propagation mechanism over an
entire network, but it has greater applicability, and could
be used to disseminate any sort of data. Additionally, one
could change propagation scope by adding predicates to
summaries, limiting the set of motes that consider them. For
example, by adding a ``hop count'' predicate to local
routing data, summaries of a mote's routing state could
reach only two-hop network neighbors of the summary owner;
this could be used to propagate copies of mote-specific
information.
As sensor networks move from research to deployment, from
laboratory to the real world, issues of management and
reconfiguration will grow in importance. We have identified
what we believe to be a core networking primitive in these
systems, update distribution, and designed a scalable,
lightweight algorithm to provide it.
which is when 2.2 TOSSIM
2.3 TinyOS motes
3. Trickle Overview
4. Maintenance
![]() . Detection happens either
because the mote transmits its summary, which will cause
others to send updates, or because another mote transmits a
newer summary. A large τ has a lower energy overhead (in
terms of packet send rate), but also has a higher discovery
latency. Conversely, a small τ sends more messages but
discovers updates more quickly.
. Detection happens either
because the mote transmits its summary, which will cause
others to send updates, or because another mote transmits a
newer summary. A large τ has a lower energy overhead (in
terms of packet send rate), but also has a higher discovery
latency. Conversely, a small τ sends more messages but
discovers updates more quickly.
4.1 Maintenance with Loss
4.2 Maintenance without Synchronization
4.3 Maintenance in a Multi-hop Network
![]()
(a)Total Transmissions per Interval![]()
(b) Receptions per
Transmission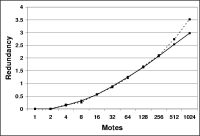
(c) Redundancy
![]()
 , where s is 1 if the mote
transmitted and 0 if not. A redundancy of 0 means Trickle
works perfectly; every mote communicates k times. For
example, a mote with ak of 2, that transmitted
(s=1), and then received twice (c=2), would
have a redundancy of 0.5 (
, where s is 1 if the mote
transmitted and 0 if not. A redundancy of 0 means Trickle
works perfectly; every mote communicates k times. For
example, a mote with ak of 2, that transmitted
(s=1), and then received twice (c=2), would
have a redundancy of 0.5 (
![]() ): it communicated
50% more than the optimum of k.
): it communicated
50% more than the optimum of k.
4.4 Load Distribution
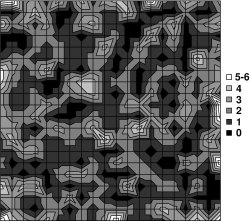
(a)Transmissions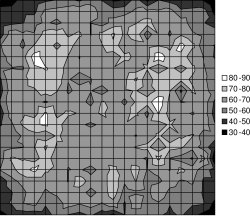
(b)Receptions
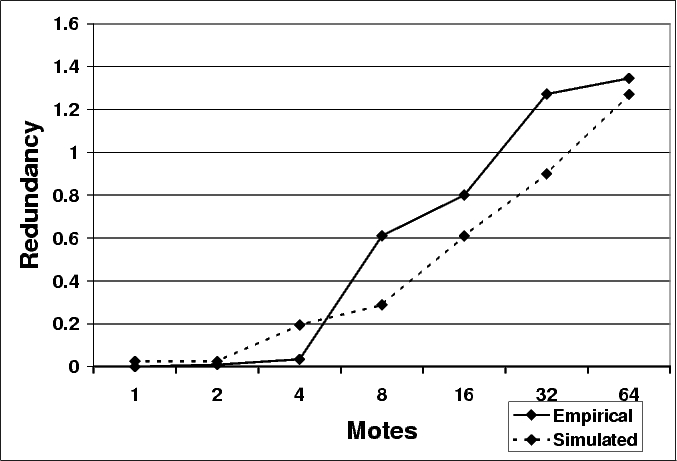
4.5 Empirical Study
![]() of
one minute, we measured Trickle redundancy over a twenty
minute period for increasing numbers of
motes. Figure 11
shows the results. They show similar scaling to the results
from TOSSIM-bit. For example, the TOSSIM-bit results in
Figure 8(c)
show a 64 mote network having an redundancy of 1.1; the
empirical results show 1.35. The empirical results show that
maintenance scales as the simulation results indicate it
should: logarithmically.
of
one minute, we measured Trickle redundancy over a twenty
minute period for increasing numbers of
motes. Figure 11
shows the results. They show similar scaling to the results
from TOSSIM-bit. For example, the TOSSIM-bit results in
Figure 8(c)
show a 64 mote network having an redundancy of 1.1; the
empirical results show 1.35. The empirical results show that
maintenance scales as the simulation results indicate it
should: logarithmically.
5. Propagation
Event
Action
τ Expires
Double τ up to τ-h. Reset c,
pick a new t.
t Expires
If c<k, transmit.
Receive same metadata
Increment c.
Receive newer metadata
Set τ to τ-l. Reset c, pick a new t.
Receive newer code
Set τ to τ-l. Reset c, pick a new t.
Receive older metadata
Send updates.
![]() . For a τ-l of
one second and a &tau-h; of one hour, this is a cost of
eleven packets to obtain a three-thousand fold increase in
propagation rate (or, from the other perspective, a three
thousand fold decrease in maintenance overhead). The simple
Trickle policy, "every once in a while, transmit unless
you've heard a few other transmissions," can be used both to
inexpensively maintain code and quickly propagate it.
. For a τ-l of
one second and a &tau-h; of one hour, this is a cost of
eleven packets to obtain a three-thousand fold increase in
propagation rate (or, from the other perspective, a three
thousand fold decrease in maintenance overhead). The simple
Trickle policy, "every once in a while, transmit unless
you've heard a few other transmissions," can be used both to
inexpensively maintain code and quickly propagate it.
5.1 Maté, a Trickle Implementation
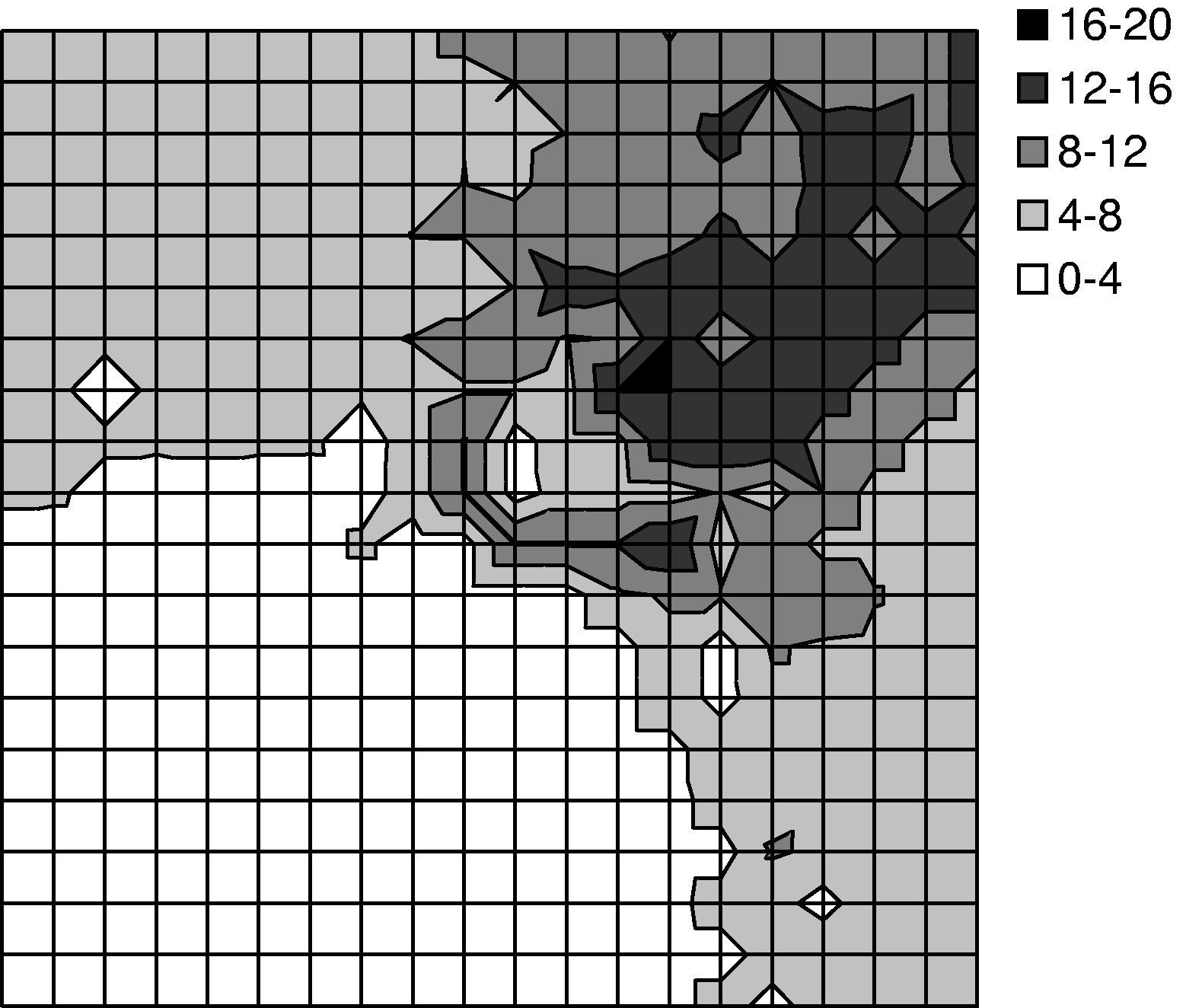
(a) 5' Spacing, 6 hops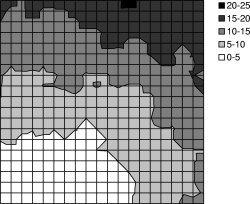
(b) 10' Spacing, 16 hops
(c) 15' Spacing, 32 hops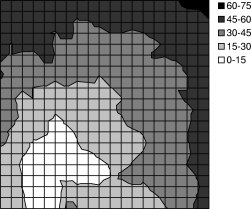
(d+) 20' Spacing, 40 hops
5.2 Simulation
5.3 Empirical Study
5.4 State
6. Related Work
7. Discussion and Conclusion
Acknowledgements
This work was supported, in part, by the Defense Department
Advanced Research Projects Agency (grants F33615-01-C-1895 and
N6601-99-2-8913), the National Science Foundation (grants
No. 0122599 and NSF IIS-033017), California MICRO program, and
Intel Corporation. Research infrastructure was provided by
the National Science Foundation (grant EIA-9802069).
Bibliography
Bimodal multicast.
ACM Transactions on Computer Systems (TOCS), 17(2):41-88,
1999.
Informed content delivery across adaptive overlay networks.
In Proceedings of the 2002 conference on Applications,
technologies, architectures, and protocols for computer communications,
pages 47-60. ACM Press, 2002.
SCALE: A tool for simple connectivity assessment in lossy
environments.
Technical Report CENS-21, 2003.
PlanetP: Using Gossiping to Build Content Addressable Peer-to-Peer
Information Sharing Communities.
Technical Report DCS-TR-487, Department of Computer Science, Rutgers
University, Sept. 2002.
Epidemic algorithms for replicated database maintenance.
In Proceedings of the sixth annual ACM Symposium on Principles
of distributed computing, pages 1-12. ACM Press, 1987.
A reliable multicast framework for light-weight sessions and
application level framing.
In Proceedings of the conference on Applications, technologies,
architectures, and protocols for computer communication, pages 342-356. ACM
Press, 1995.
An empirical study of epidemic algorithms in large scale multihop
wireless networks, 2002.
Submitted for publication, February 2002.
Building efficient wireless sensor networks with low-level naming.
In Symposium on Operating Systems Principles, pages 146-159,
2001.
Adaptive protocols for information dissemination in wireless sensor
networks.
In Proceedings of the fifth annual ACM/IEEE international
conference on Mobile computing and networking, pages 174-185. ACM Press,
1999.
Mica: a wireless platform for deeply embedded networks.
IEEE Micro, 22(6):12-24, nov/dec 2002.
System Architecture Directions for Networked Sensors.
In Architectural Support for Programming Languages and Operating
Systems, pages 93-104, 2000.
TinyOS is available at http://webs.cs.berkeley.edu.
The mistaken axioms of wireless-network research.
Technical Report TR2003-467, Dept. of Computer Science, Dartmouth
College, July 2003.
Maté: a Virtual Machine for Tiny Networked Sensors.
In Proceedings of the ACM Conference on Architectural Support
for Programming Languages and Operating Systems (ASPLOS), Oct. 2002.
TOSSIM: Simulating large wireless sensor networks of tinyos motes.
In Proceedings of the First ACM Conference on Embedded Networked
Sensor Systems (SenSys 2003), 2003.
Impala: a middleware system for managing autonomic, parallel sensor
systems.
In Proceedings of the ninth ACM SIGPLAN symposium on Principles
and practice of parallel programming, pages 107-118. ACM Press, 2003.
Route driven gossip: Probabilistic reliable multicast in ad hoc
networks.
In Proc. of INFOCOM 2003, 2003.
The Design and Evaluation of a Query Processing Architecture for
Sensor Networks.
PhD thesis, UC Berkeley, Decmeber 2003.
http://www.cs.berkeley.edu/~madden/thesis.pdf.
TAG: a Tiny AGgregation Service for Ad-Hoc Sensor Networks.
In Proceedings of the ACM Symposium on Operating System Design
and Implementation (OSDI), Dec. 2002.
The broadcast storm problem in a mobile ad hoc network.
In Proceedings of the fifth annual ACM/IEEE international
conference on Mobile computing and networking, pages 151-162. ACM Press,
1999.
Efficient code distribution in wireless sensor networks.
In Proceedings of the Second ACM International Workshop on
Wireless Sensor Networks and Applications (WSNA '03), 2003.
Probabilistic broadcast for flooding in wireless networks.
Technical Report IC/2002/54, 2002.
Lessons from a sensor network expedition.
In Proceedings of the 1st European Workshop on Wireless Sensor
Networks (EWSN '04), January 2004.
Understanding packet delivery performance in dense wireless sensor
networks.
In Proceedings of the First International Conference on Embedded
Network Sensor Systems, 2003.
Footnotes
 .
For time t,
.
For time t,  will have started
their intervals. From this, we can compute the expected time
after a transmission that another transmission will
occur. This is when
will have started
their intervals. From this, we can compute the expected time
after a transmission that another transmission will
occur. This is when

 , that is, when
, that is, when  time has passed. There
will therefore be O(√n)transmissions.
time has passed. There
will therefore be O(√n)transmissions.